今回は出力の方に手を広げてみようと思います。
Arduinoに書いたプログラムで、サーボモーターの動きのコントロールにチャレンジしてみます。
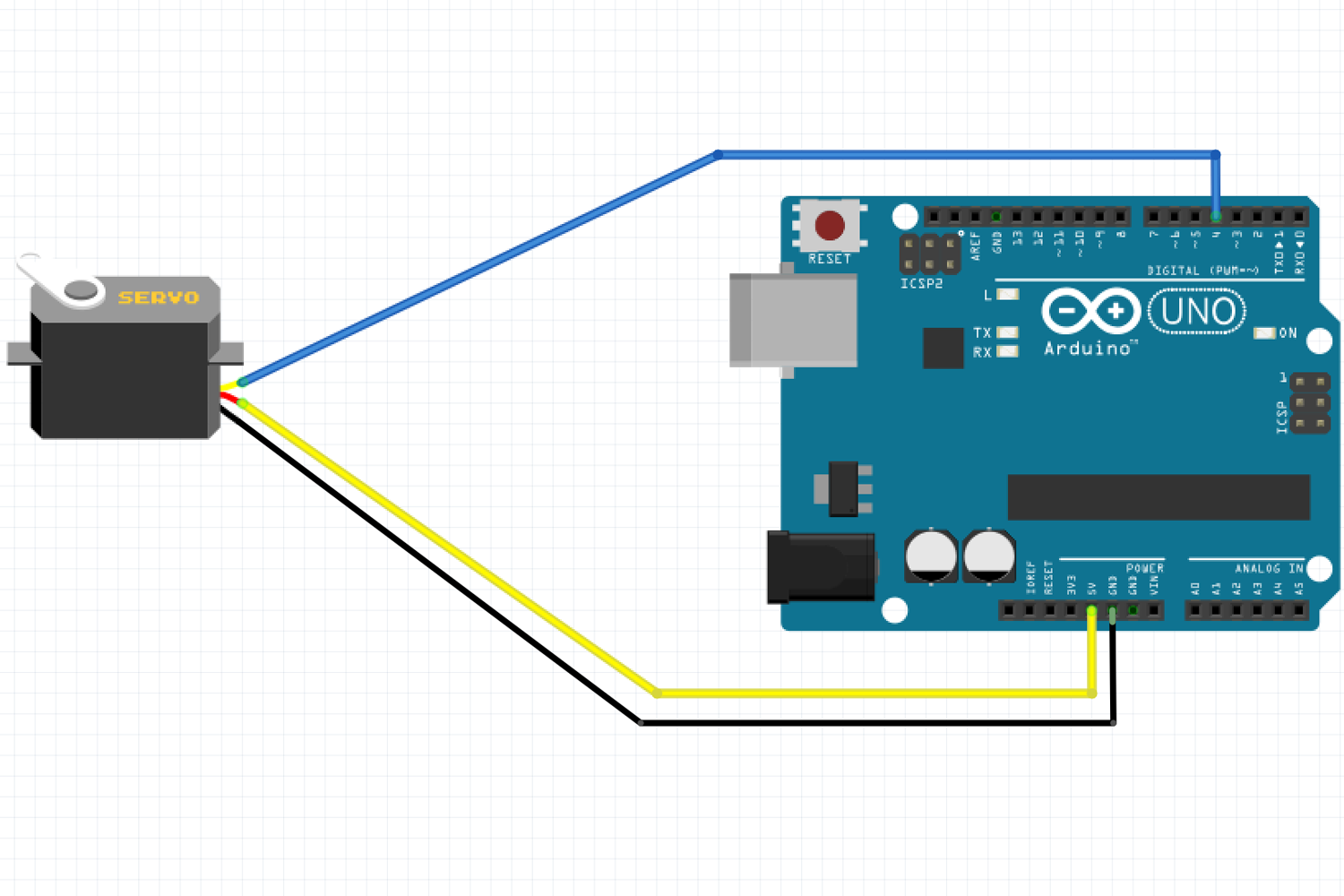
下記のページを参考に組み立ててみました。
第57回 Arduinoでモーター再入門(その1)サーボモーターの基本
使った部品
・Arduino UNO
・USBケーブル
・Jumper Wires * 3
・サーボモーター(使用電圧: 4.2V~6V)
※モーターに必要な電圧が大きければ別途電源が必要ですが、Arduinoの電源が5vで今回使うモーターが小型だったので特に使いませんでした。
プログラム
サーボモーターを使うにはIDEに最初から入っているスケッチの例を参照するのが早いようです。下記の手順でServoModindicatorを開いてみます。
「ファイル」>「スケッチの例」>「10.StarterKit BasicKit」>「p05_ServoMoodindicator」
これをそのままArduinoに書き込んでも動きますが、一番シンプルなところまでコード削ってみました。
1秒おきに回転角度を変えてモーターを動かすプログラムです。
//サーボモーターを制御するためのライブラリをインクルード
#include<Servo.h>
Servo servo1; //任意のサーボモータークラスを用意。
void setup(void){
servo1.attach(4); //デジタル4番ピンをサーボモーターの出力ピンとして設定
}
void loop(void){
//定義したモーターに回転角度となる引数を入れる。
servo1.write(140);
delay(1000);
servo1.write(10);
delay(1000);
servo1.write(90);
delay(1000);
}
これが出来れば、センサーからの入力値をもとに角度を制御するなんてのも簡単にできそうです。
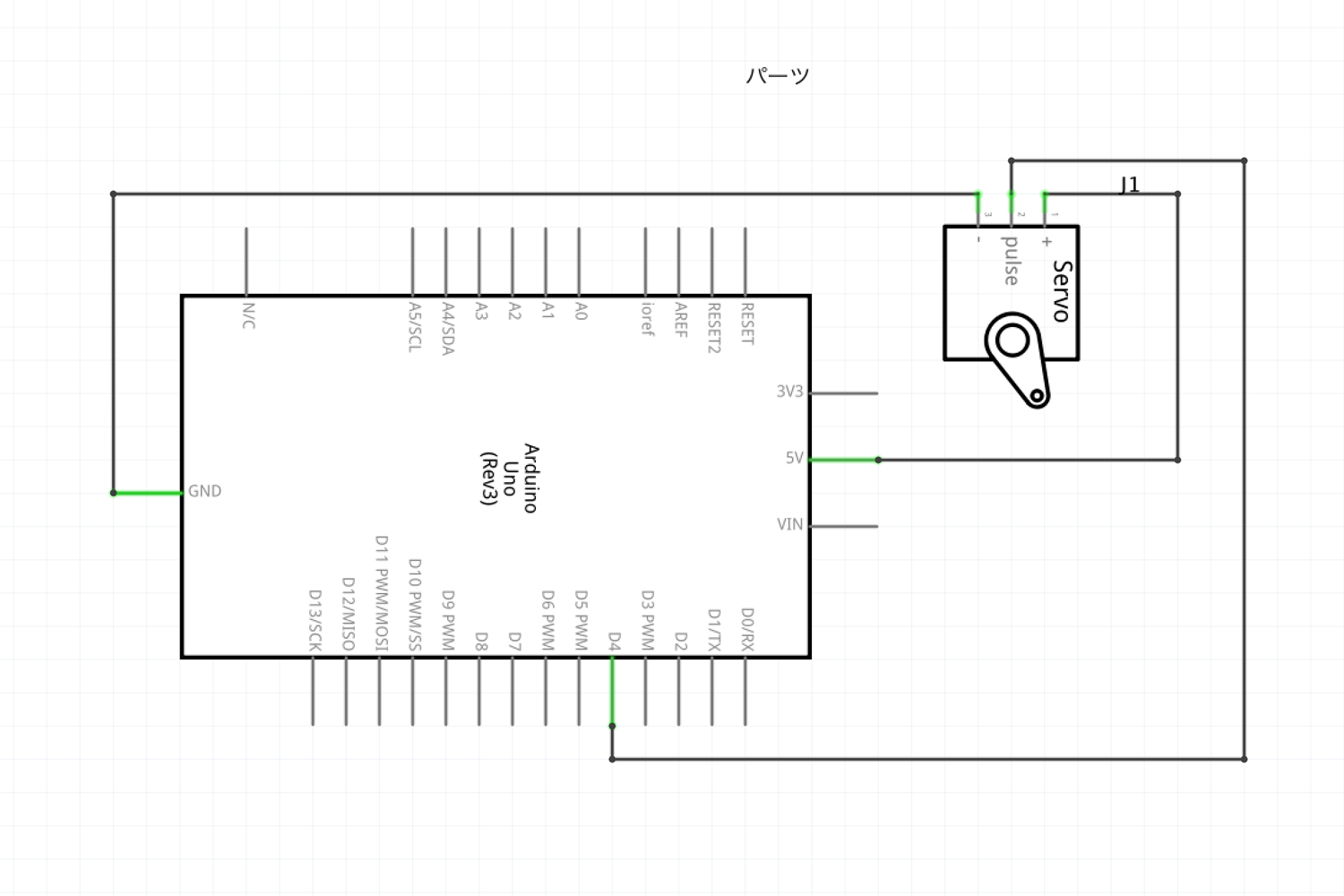
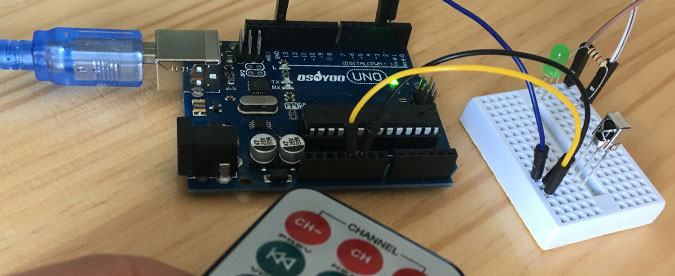
回路図